You have probably already heard about a Multi Reference Clock Source from Meinberg, commonly referred as an MRS. What is it about? This is a receiver that can use other input signals in addition to GNSS to synchronize the system. Therefore its name: Multi- Reference- Source. The reference signals commonly used may be:
- PTP (IEEE 1588) – Precision Time Protocol coming from the network
- PPS (Pulse per Second) + String. For example if you have a highly stable and precise phase coming from a local atomic clock or from a time service provider (e.g. NPL Time).
- Time Code e.g. IRIG B
- External Rubidium – PPS coming from a trusted source, an atomic clock for example.
- NTP – NTP coming from an external time server and can be used for backup.
- Sync-E
- Serial String + PPS e.g. NMEA
- E1 and T1
- Video signals (e.g. Blackburst)
- 10MHz
Any of the available input signals can synchronize a reference clock integrated in a LANTIME system. MRS is supported on clock modules with at least a high precision OCXO SQ oscillator or higher quality. Meinberg products typically allow you to choose from a number of oscillator options,you can find their holdover performance and other attributes in the oscillator list here.
In general, the MRS algorithm switch to the next available reference source, according to the MRS prioritization.
The question is, how does the reference clock selection work if multiple reference sources are available, and how does the system switch smooth to a source if the active one becomes unavailable? The answer is IRSA – the Intelligent Reference Switching Algorithm.
IRSA ensures that switching from the superior reference signal to the less accurate one is delayed as long as the highly stable oscillator can provide better accuracy in holdover than the next available reference signal in the priority list.
To ensure that IRSA is working properly, a user has to set a priority list of available incoming reference signals in descending order from the superior one to inferior in terms of their accuracy. Here is one good example how to configure a priority list:
1. Source: GNSS / GPS
2. PTP – IEEE1588
3. IRIG Time Code (AM, DCLS)
4. external NTP-Server
In the second step, a user has to activate IRSA and provide a list of estimated precision for each incoming signal. Here are some typical values used in a LANTIME system:
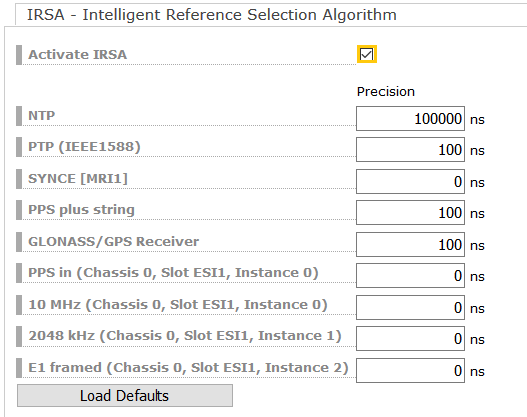 Figure 1: A list with default estimated precision values for different incoming signals.
Figure 1: A list with default estimated precision values for different incoming signals.
Let’s do some quick math to see how the IRSA would work with an OCXO HQ oscillator and the following signal priority list with corresponding precisions:
GPS (100 ns)-> IRIG B (10 us)-> NTP (100 us).
The holdover time for switching to the next reference is calculated by using a ratio of precision values (the current and the new one) and a constant value which specifies the holdover performance of a given oscillator.
For this example the IRSA will automatically switch after 16 hours to IRIG B time code if GPS was unavailable and after 2 days to NTP, considering the properties of the HQ oscillator and estimated precision values of the involved signals.
You can monitor the status of your input signals in the Web GUI (Clock Menu ->MRS Status). In the Offset column you can find the offset values of incoming signals measured against the currently active reference.
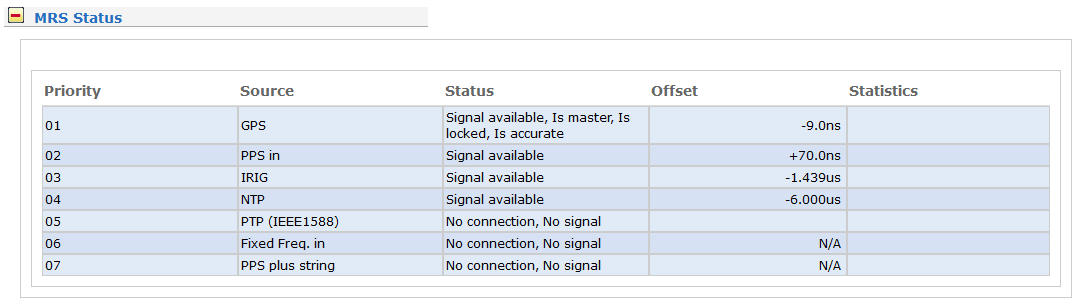
Figure 2: The status information of available input reference signals.
So, this is all for today about the MRS operation and IRSA switching algorithm. If you have a question or a comment, please use the form below, write me an email to: andreja.jarc[at]meinberg.de or visit our website at: www.meinbergglobal.com
See you next time!
Wouldn’t the MRS need carefully calibrated offset corrections to avoid “clock hooping” (offset changing when time source changes)?
A typical end-user having GPS, maybe some PPS, and an NTP server on the LAN does not have an idea how to calibrate these offsets ( (and neither the equipment needed).
What are the recommendations?
Good question. It is helpful to have an idea of the expect accuracies of the various inputs. For example, switching to standard NTP means that you can live with ms level accuracies, although NTP in a LAN can be much better. Set some kind of alert up when the reference changes, and make sure some one knowledgeable is responsible for deciding what to do when an alert is issued. Other ways of monitoring the timing health of the network are also helpful.